EasyFeeder Status
Die EasyFeeder Steuerung belegt 100 Byte an Daten am Feldbus und bildet alle relevanten Parameter für die Ansteuerung des Feeder ab.
Nähere Informationen finden Sie in unserem EasyFeeder Feldbus Bereich!
Das Ausgangsmodul beinhaltet alle Status- und Ergebnisdaten der Feeder-Station.
Hinweis: Diese Funktion ist lizenzpflichtig. Eine separate TCP/IP Kommunikation kann dadurch entfallen.
| Signal | Byte / Bit | Datentyp | Flanke | Beschreibung |
|---|---|---|---|---|
| Smart Sequence IO | 0.0 | Bit | Positiv | Smart Sequence wurde erfolgreich abgearbeitet. |
| Smart Sequence NIO | 0.1 | Bit | Positiv | Smart Sequence wurde mit Fehler beendet. |
| Positionen gültig (Toogle) | 0.2 | Bit | Positiv / Negativ | Position 1-5 sind gültig und Werte können verwendet werden. Dies ist eine Rückmeldung auf 'Get Part'. |
| Station aktiv (Online/Offline) | 0.3 | Bit | Positiv / Negativ | Aktueller Zustand der Station (Online / Offline). |
| Teile bereit (Parts Prepared) | 0.4 | Bit | Positiv / Negativ | Rückantwort auf 'Prepart Part'. Gibt an, dass Teile für 'Get Part' abholbereit sind. |
| Programmwechsel IO | 0.5 | Bit | Positiv | Dieses Bit signalisiert, dass der zuletzt angestoßene Programmwechsel erfolgreich war. |
| Programmwechsel NIO | 0.6 | Bit | Positiv | Dieses Bit signalisiert, dass der zuletzt angestoßene Programmwechsel nicht erfolgreich war. |
| Smart Sequence Running | 0.7 | Bit | Positiv / Negativ | Dieses Bit signalisiert, dass eine Smart Sequence aktiv ist. |
| Smart Sequence done (Toogle) | 1.0 | Bit | Positiv / Negativ | Dieses Bit signalisiert, dass eine Smart Sequence beendet wurde. |
| Kamera Kalibrierung Gültig | 1.1 | Bit | - | Zeigt an, ob die Kamerakalibrierung vorhanden und der RMS Fehler im erlaubten Bereich ist. |
| Roboter Kalibrierung gültig | 1.2 | Bit | - | Zeigt an, ob die Roboterkalibrierung vorhanden und der RMS Fehler im erlaubten Bereich ist. |
| Asycube verbunden | 1.3 | Bit | - | Verbindungsstatus zum Asyril Asycube. True = Gerät verbunden |
| Asycube Alarm | 1.4 | Bit | - | Alarmzustand des Asyril Asycubes. True = Alarm aktiv (z.B.: S-Versorgung unterbrochen - Not Aus). Um den Alarm abzulöschen, ist ein Stop Production / Start Production notwendig. |
| Programmnummer | 2-3 | Ganzzahl | - | Programmnummer des aktuell geladenen Programms. |
| SmartSequence Code | 4-5 | Ganzzahl | - | Antwort / Fehler Code der letzten Smart Sequence |
| Teile auf Plattform | 6-7 | Ganzzahl | - | Anzahl an ungefähren Teilen auf der Plattform. Dies ist eine Schätzung anhand der belegten Fläche. |
| Greifbare Teile | 8-9 | Ganzzahl | - | Anzahl an greifbaren Teilen im Buffer, die noch nicht abgefragt wurden. Jeder Aufruf von 'Get Part' reduziert diese Anzahl. |
| Anzahl Positionen | 10-11 | Ganzzahl | - | Anzahl an gültigen Positionen (1-5) als Bestätigung von Get Part. Entspricht dem Parameter 'Anzahl Teile / Pick'. |
| Position 1 | ||||
| X | 12-15 | Gleitkomma | - | X Koordinate des Bauteils |
| Y | 16-19 | Gleitkomma | - | Y Koordinate des Bauteils |
| Winkel | 20-23 | Gleitkomma | - | Winkel des Bauteils |
| ID | 24-25 | Ganzzahl | - | ID des Bauteils für spätere Verwendung. Aktuell: ID = 1, wenn Position gültig ist. Kann durch den Prüfschritt 'Custom ID' gesetzt werden. |
| Position 2 | ||||
| X | 26-29 | Gleitkomma | - | X Koordinate des Bauteils |
| Y | 30-33 | Gleitkomma | - | Y Koordinate des Bauteils |
| Winkel | 34-37 | Gleitkomma | - | Winkel des Bauteils |
| ID | 38-39 | Ganzzahl | - | ID des Bauteils für spätere Verwendung. Aktuell: ID = 1, wenn Position gültig ist. Kann durch den Prüfschritt 'Custom ID' gesetzt werden. |
| Position 3 | ||||
| X | 40-43 | Gleitkomma | - | X Koordinate des Bauteils |
| Y | 44-47 | Gleitkomma | - | Y Koordinate des Bauteils |
| Winkel | 48-51 | Gleitkomma | - | Winkel des Bauteils |
| ID | 52-53 | Ganzzahl | - | ID des Bauteils für spätere Verwendung. Aktuell: ID = 1, wenn Position gültig ist. Kann durch den Prüfschritt 'Custom ID' gesetzt werden. |
| Position 4 | ||||
| X | 54-57 | Gleitkomma | - | X Koordinate des Bauteils |
| Y | 58-61 | Gleitkomma | - | Y Koordinate des Bauteils |
| Winkel | 62-65 | Gleitkomma | - | Winkel des Bauteils |
| ID | 66-67 | Ganzzahl | - | ID des Bauteils für spätere Verwendung. Aktuell: ID = 1, wenn Position gültig ist. Kann durch den Prüfschritt 'Custom ID' gesetzt werden. |
| Position 5 | ||||
| X | 68-71 | Gleitkomma | - | X Koordinate des Bauteils |
| Y | 72-75 | Gleitkomma | - | Y Koordinate des Bauteils |
| Winkel | 76-79 | Gleitkomma | - | Winkel des Bauteils |
| ID | 80-81 | Ganzzahl | - | ID des Bauteils für spätere Verwendung. Aktuell: ID = 1, wenn Position gültig ist. Kann durch den Prüfschritt 'Custom ID' gesetzt werden. |
| Parameter | ||||
| Anzahl Teile / Pick (part_quantity) | 82-83 | Ganzzahl | - | Definiert die Anzahl an Teilen, die von 'Get Part' und 'Prepare Part' für eine erfolgreiche Ausführung erkannt werden müssen. Parameter: part_quantity |
| Erkennungszeit (s) (timeout) | 84-85 | Ganzzahl | - | Dieses Timeout (in Sekunden) wird bei der Ausführung der Smart Sequenzen (wie get_part) verwendet. Wird das Timeout überschritten, dann wird der Befehl abgebrochen und eine Timeout Meldung gesendet. Parameter: timeout |
| Neues Bild (image_after send) | 86 | Byte | - | Erzwingt die Aufnahme eines Bildes, nachdem ein Teil entnommen wurde. Jedes Mal, wenn 'Get Part' oder 'Prepare Part', nimmt das System unmittelbar vorher automatisch ein Bild auf. Parameter: image_after_send |
| Kalibrierung | ||||
| Kamera Rms | 88-91 | Gleitkomma | - | Aktueller Rms Fehler der Kamerakalibrierung. |
| Roboter Rms | 92-95 | Gleitkomma | - | Aktueller Rms Fehler der Roboterkalibrierung. |
Im Kommunikationsexplorer sieht das Eigenschaftsfenster der Stationssteuerung wie folgt aus:
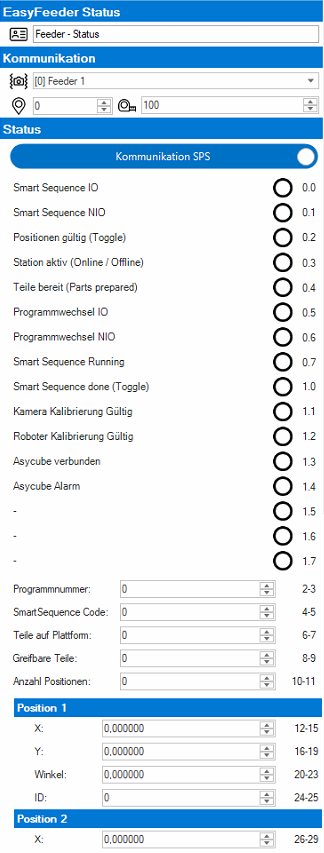
Im Feld "EasyFeeder Status" kann ein Name des Bausteins vergeben werden.
Unter "Kommunikation" legt man fest, welcher Station diese Bautein zugeordnet wird und man kann das Startbyte im Datenbereich der Schnittstelle festlegen.
Im Feld "Status" ist der aktuelle Status der Signale ersichtlich beziehungsweise kann man hier den Signalfluss von der externen Steuerung überbrücken und die einzelnen Signale selbst steuern.